沙九方灣流智能科技有限公司")

-
關(guān)于我們長(zhǎng)沙灣流智能科技有限公司是一家專業(yè)致力于工程機(jī)械傳感、 控制、驅(qū)動(dòng)、互聯(lián)技術(shù)產(chǎn)品研究與開(kāi)發(fā)的公司,也是一家專注為客戶提供復(fù) 雜運(yùn)動(dòng)控制系統(tǒng)成套解決方案的高技術(shù)企業(yè)。
于我們")
-
業(yè)務(wù)范圍長(zhǎng)沙灣流智能科技有限公司是一家專業(yè)致力于工程機(jī)械傳感、 控制、驅(qū)動(dòng)、互聯(lián)技術(shù)產(chǎn)品研究與開(kāi)發(fā)的公司,也是一家專注為客戶提供復(fù) 雜運(yùn)動(dòng)控制系統(tǒng)成套解決方案的高技術(shù)企業(yè)。
務(wù)范圍")
-
產(chǎn)品中心
-
解決方案長(zhǎng)沙灣流智能科技有限公司是一家專業(yè)致力于工程機(jī)械傳感、 控制、驅(qū)動(dòng)、互聯(lián)技術(shù)產(chǎn)品研究與開(kāi)發(fā)的公司,也是一家專注為客戶提供復(fù) 雜運(yùn)動(dòng)控制系統(tǒng)成套解決方案的高技術(shù)企業(yè)。

-
新聞動(dòng)態(tài)長(zhǎng)沙灣流智能科技有限公司是一家專業(yè)致力于工程機(jī)械傳感、 控制、驅(qū)動(dòng)、互聯(lián)技術(shù)產(chǎn)品研究與開(kāi)發(fā)的公司,也是一家專注為客戶提供復(fù) 雜運(yùn)動(dòng)控制系統(tǒng)成套解決方案的高技術(shù)企業(yè)。
態(tài)")
臂架運(yùn)動(dòng)控制
SOLUTION

多關(guān)?節(jié)機(jī)械臂運(yùn)動(dòng)規(guī)劃
多策略臂架運(yùn)動(dòng)規(guī)劃控制應(yīng)對(duì)復(fù)雜的施工環(huán)境。
臂架平順運(yùn)動(dòng)控制
解決臂架運(yùn)動(dòng)/回轉(zhuǎn)平順問(wèn)題,減小臂架運(yùn)動(dòng)引起的抖動(dòng)、晃動(dòng)。
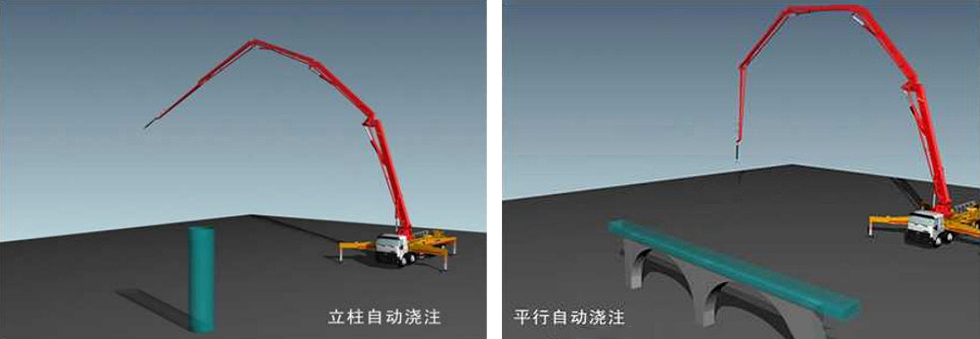
什么是智能臂架
對(duì)于大型多關(guān)節(jié)機(jī)械臂,例如混凝土臂架泵車,曲臂式高空作業(yè)車、濕噴機(jī)。現(xiàn)場(chǎng)施工中需要對(duì)多個(gè)機(jī)械臂進(jìn)行遙控操作,存在操作按鈕繁多,動(dòng)作復(fù)雜,不直觀等諸多問(wèn)題。智能臂架技術(shù)就是通過(guò)一套簡(jiǎn)單的萬(wàn)向手柄直接對(duì)臂架末端點(diǎn)進(jìn)行運(yùn)動(dòng)控制,不需要關(guān)心每一節(jié)機(jī)械臂的運(yùn)動(dòng)軌跡和速度,這些都由機(jī)器算法自動(dòng)加以控制。
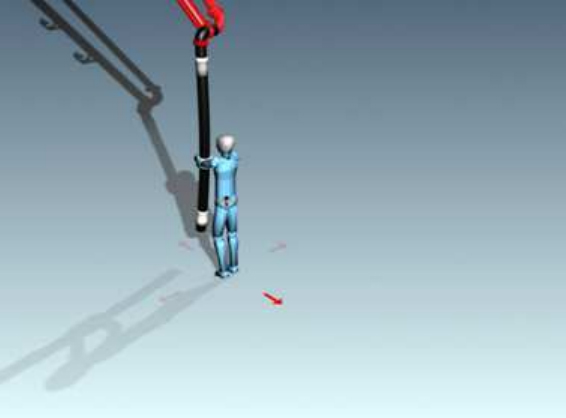
簡(jiǎn)言之,就是通過(guò)遙控器:
■ 給定一個(gè)向前或者向后移動(dòng)的指令,臂架末端自動(dòng)沿著直線往前或者往后移動(dòng);
■ 給定一個(gè)向上或者向下移動(dòng)的指令,臂架末端軟管自動(dòng)沿著直線向上或者向下移動(dòng);
■ 只需要使用萬(wàn)向手柄就可以控制臂架末端的移動(dòng)方向,不再需要對(duì)每一個(gè)油缸進(jìn)行操控。
智能臂架給您帶來(lái)的好處
■ 簡(jiǎn)化操作,降低勞動(dòng)強(qiáng)度,降低操作手技能素質(zhì),節(jié)省成本
傳統(tǒng)泵車的每節(jié)臂架都需要單獨(dú)進(jìn)行控制,臂架末端的平穩(wěn)移動(dòng)和精準(zhǔn)定位難度很大。操作手的勞動(dòng)強(qiáng)度大,易疲勞。臂架末端定位技術(shù)是給定末端位置,機(jī)器自動(dòng)規(guī)劃每節(jié)臂架的姿態(tài)。操作手只需要將注意力集中在末端位置的控制上,臂架的姿態(tài)由機(jī)器自動(dòng)管理。
智能臂架技術(shù)還包含如下技術(shù)細(xì)節(jié):① 給定末端位置下,臂架姿態(tài)可以手動(dòng)調(diào)節(jié),以優(yōu)化姿態(tài)形式;② 臂架姿態(tài)自適應(yīng)調(diào)節(jié)能夠有效避開(kāi)障礙物。
■ 振動(dòng)抑制,動(dòng)作更加平穩(wěn)
泵車臂架因受到周期性泵送沖擊作用而產(chǎn)生受迫振動(dòng),智能臂架技術(shù)能夠主動(dòng)對(duì)臂架的振動(dòng)進(jìn)行有效抑制,避免臂架大幅振蕩,影響末端定位和混凝土布料施工,同時(shí)避免安全事故的發(fā)生。
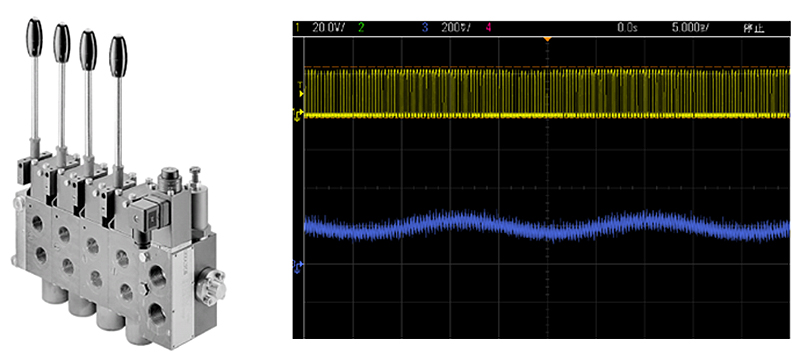
■ 臂架控制更平順
臂架多路閥采用電比例閥進(jìn)行控制,電比例閥線性關(guān)系不是很好,其電阻受溫度影響較大。同時(shí),臂架采用4連桿機(jī)構(gòu),油缸直線位移與臂架角位移不具備線性關(guān)系。臂架平順控制可以有效解決操作手動(dòng)作手感與臂架動(dòng)作線性關(guān)系的問(wèn)題。同時(shí)提高臂架啟動(dòng)、停止的平穩(wěn)性,同時(shí)減少動(dòng)作響應(yīng)時(shí)間和感覺(jué)上的遲滯現(xiàn)象,提升操控手感。
智能臂架關(guān)鍵技術(shù)
■ 先進(jìn)的臂架姿態(tài)定位技術(shù)
SV系列高動(dòng)態(tài)響應(yīng)角度傳感器,專用于檢測(cè)動(dòng)態(tài)機(jī)械臂的實(shí)時(shí)角度。其具有優(yōu)良的動(dòng)態(tài)響應(yīng)特性、強(qiáng)抗外部運(yùn)動(dòng)擾動(dòng)特性。即使臂架在強(qiáng)烈抖動(dòng)情況下依然能夠非常精準(zhǔn)的測(cè)量出臂架姿態(tài)。

■ 先進(jìn)的臂架姿態(tài)規(guī)劃算法
采用最優(yōu)姿態(tài)規(guī)劃算法,能夠自動(dòng)根據(jù)末端軟管的運(yùn)動(dòng)命令,自動(dòng)計(jì)算每一節(jié)臂架油缸驅(qū)動(dòng)速度以及位移量,自動(dòng)完成臂架的控制。自有核心臂架規(guī)劃算法不再使用常規(guī)的逆向求解算法,從而根本上解決了多解問(wèn)題、奇異解問(wèn)題、不連續(xù)性等問(wèn)題。同時(shí)算法實(shí)現(xiàn)非常簡(jiǎn)單,降低了解算的復(fù)雜性,降低了計(jì)算要求,極大的提高了實(shí)用性。

■ 先進(jìn)的臂架油缸液壓驅(qū)動(dòng)技術(shù)
新型技術(shù)可以使得臂架多路閥動(dòng)作更加靈敏,抖動(dòng)更加小。ST系列動(dòng)態(tài)傾角傳感器內(nèi)置的核心電液比例閥驅(qū)動(dòng)算法,不同于傳統(tǒng)的PWM驅(qū)動(dòng)技術(shù),而是采用了一種XPWM,可以使得臂架多路閥動(dòng)作更加靈敏,抖動(dòng)更加小。
技術(shù)發(fā)展現(xiàn)狀
智能臂架技術(shù),作為一項(xiàng)高精尖技術(shù),具有極大的影響力。
■ 能夠極大提升泵車施工智能化程度。
■ 能夠極大展示企業(yè)研發(fā)實(shí)力,提升企業(yè)全球品牌影響力。
■ 能夠創(chuàng)造巨大的經(jīng)濟(jì)效益。
我們長(zhǎng)年深耕工程機(jī)械運(yùn)動(dòng)傳感與控制領(lǐng)域,對(duì)工程機(jī)械智能化有著非常深刻的認(rèn)識(shí)與獨(dú)到的見(jiàn)解,在泵車臂架智能化技術(shù)上有5項(xiàng)發(fā)明專利。
公司最新研制的高動(dòng)態(tài)空間角度傳感器以及超長(zhǎng)臂架液壓機(jī)器人技術(shù)已經(jīng)在三一重工60米大型泵車上得到試驗(yàn)。自主研發(fā)的核心技術(shù)產(chǎn)品及動(dòng)態(tài)控制技術(shù)充分解決了當(dāng)下超長(zhǎng)臂架泵車無(wú)人化施工控制瓶頸問(wèn)題,有望使得泵車智能臂架及無(wú)人施工真正走向規(guī)模化應(yīng)用。
亮點(diǎn)1:先進(jìn)的智能臂架規(guī)劃算法,可以完成長(zhǎng)達(dá)100米的大型液壓臂架自主規(guī)劃控制。
亮點(diǎn)2:先進(jìn)的臂架姿態(tài)角度測(cè)量方法,能夠準(zhǔn)確測(cè)量臂架每一瞬間姿態(tài),使得末端定位更加精準(zhǔn)。
亮點(diǎn)3:先進(jìn)的臂架油缸液壓驅(qū)動(dòng)技術(shù),確保臂架動(dòng)作更加平穩(wěn)。
亮點(diǎn)4:長(zhǎng)年深耕工程機(jī)械智能化研究,技術(shù)碩果累累。
相關(guān)產(chǎn)品
Download Center
量模塊")
9軸AHRS航姿測(cè)量,6軸IMU慣性測(cè)量
具備行業(yè)領(lǐng)先的信號(hào)處理流程,可抗加減速、振動(dòng)干擾
通信接口:UART串口,可驅(qū)動(dòng)RS485/RS232芯片,支持Modbus RTU協(xié)議。
陀螺運(yùn)動(dòng)補(bǔ)償:運(yùn)用先進(jìn)算法實(shí)現(xiàn)動(dòng)態(tài)精準(zhǔn)測(cè)量,有效消除因物體運(yùn)動(dòng)產(chǎn)生的測(cè)量誤差,確保數(shù)據(jù)準(zhǔn)確性。
橢球非線性校準(zhǔn):通過(guò)獨(dú)特的橢球非線性校準(zhǔn)技術(shù),進(jìn)一步提升測(cè)量精度,使測(cè)量結(jié)果更加接近真實(shí)值。
GPS 融合功能:可接入 GPS實(shí)現(xiàn)慣性導(dǎo)航測(cè)量,為導(dǎo)航應(yīng)用提供更穩(wěn)定、精確的數(shù)據(jù)支持。
固件升級(jí)支持,不斷優(yōu)化產(chǎn)品性能,持續(xù)滿足用戶的多樣化需求以及不斷變化的應(yīng)用場(chǎng)景。
兼容PLCC44封裝
單軸和雙軸傾斜報(bào)警
正向、反向報(bào)警角可單獨(dú)設(shè)置
精度:±0.3°、±0.1°可選
堅(jiān)固設(shè)計(jì)輕松應(yīng)對(duì)各種惡劣環(huán)境
具備雷擊、浪涌、電壓沖擊防護(hù),經(jīng)久耐用
同時(shí)采集4路應(yīng)變式稱重傳感器
具備較高的電磁兼容特性,抗干擾能力強(qiáng)
寬溫度范圍:-40℃到+85℃
寬工作電壓:9-33V
不銹鋼沖壓模具一體成型外殼,簡(jiǎn)潔美觀
電路具備防錯(cuò)接、反接保護(hù),工作可靠
客戶案例
CASE
關(guān)注我們
營(yíng)業(yè)執(zhí)照 © COPYRIGHT 2022-2025 長(zhǎng)沙灣流智能科技有限公司 | SEO標(biāo)簽 | 網(wǎng)站建設(shè):中企動(dòng)力長(zhǎng)沙